GPP2 Toolpath Points
Inside Cimatron, the toolpath points are defined relative to each procedure UCS (also known as the procedure origin). GPP2 converts every tool point to the REF coordinate system.
ROT_MAT and TRANS_MAT are not used in GPP2. All conversions between the original procedure UCS and the REF UCS are being taken care of by GPP2.
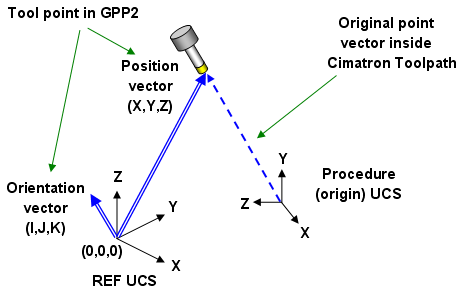
The following diagram shows a tool point in the REF UCS (showing both position and orientation), as well as the original position vector in the procedure UCS.