|
|
Status Bar
The Status Bar of the Machine Simulator displays information on the settings and simulation states.
Automatic Quality Improvement
Automatic Quality Improvement (AQI) is a feature that enhances the stock quality while the simulation is paused or stopped. The Status Bar shows 2 messages:
- Automatic Quality Improvement (entire stock(s)) - this is shown when the stock refinement process is performed on all stocks present in the simulation.
- Automatic Quality Improvement (view area) - this is shown when the stock refinement process is performed only on the area that is seen in the OpenGL at the respective moment.
RTCP status
The RTCP status represents the current setting executed by the Machine Simulator for cutting and collision checking between two consecutive moves.
Information
RTCP (Rotation Tool Center Point, or also known as TCPM / TTPC / TCP / TRAORI) (for MachSim: RTCP ON) is a liner interpolation of tool tip positions and is equivalent to the following commands in the NC G-Code:
- FANUC: G43.4
- Heidenhain: M128 (M91) (or FUNCTION TCPM PATHCTRL);
- Siemens: TRAORI
Non-RTCP (for MachSim: RTCP OFF) is a liner interpolation of machine axis values and is equivalent to the following commands in the NC G-Code:
- FANUC: G49
- Heidenhain: M129
- Siemens: TRAFOOF
The status can be one of the following (for more on the parameters in this section, see Info):
- RTCP: ON (Vector based) - This appears when the simulation contains command(s) to turn ON RTCP with interpolation based on tool vectors, and the Maximum Distance for interpolation is smaller than or equal to 5 mm (or 0.2 inches) and the Maximum Angle Change for interpolation is smaller than or equal to 5 degrees.
- RTCP: ON (Vector based) - Loose interpolation - this appears when the simulation contains command(s) to turn ON RTCP with interpolation based on tool vectors, and the Maximum Distance for interpolation is greater than 5 mm (or 0.2 inches) or the Maximum Angle Change for interpolation is greater than 5 degrees.
- RTCP: ON (Machine angles) - This appears when the simulation contains command(s) to turn ON RTCP with interpolation based on machine angles, and the Maximum Distance for interpolation is smaller than or equal to 5 mm (or 0.2 inches) and the Maximum Angle Change for interpolation is smaller than or equal to 5 degrees.
- RTCP: ON (Machine angles) - Loose interpolation - this appears when the simulation contains command(s) to turn ON RTCP with interpolation based on machine angles, and the Maximum Distance for interpolation is greater than 5 mm (or 0.2 inches) or the Maximum Angle Change for interpolation is greater than 5 degrees.
- RTCP: OFF - This appears when the simulation contains command(s) to turn OFF RTCP and the Maximum Distance for interpolation is smaller than or equal to 5 mm (or 0.2 inches) and the Maximum Angle Change for interpolation is smaller than or equal to 5 degrees.
- RTCP: OFF - Loose interpolation - This appears when commands are given to turn OFF RTCP and the Maximum Distance for interpolation is greater than 5 mm (or 0.2 inch) or the Maximum Angle Change for interpolation is greater than 5 degrees.
- RTCP: ERROR (Could not activate RTCP) - This appears when MachSim fails to activate the requested RTCP mode.
- RTCP: UNSET - this is shown when the simulation contains none of the command(s) to activate the RTCP modes.
RTCP: UNSET
By not setting an RTCP mode (or by not providing consecutive moves with a distance smaller than or equal to 5 mm (or 0.2 inches) and if the angle change is smaller than or equal to 5 degrees), the Machine Simulation may give inconsistent results. These inconsistent results can be noticed when using the Run or Fast Forward buttons, or when using different simulation modes (i.e. NC-based Mode, Length-based Mode or Time-based Mode) with different Simulation Run Speed slider positions.
The Machine Simulation always supports RTCP kinematics for collision checking. When RTCP (ON/OFF) is used, the Machine Simulation activates an internal algorithm that adds interpolated moves. This means that between any two consecutive provided machine positions, the machine axis values or tool tip positions and vector (depending on the RTCP setting) are interpolated using steps with values set by the Maximum Distance and Maximum Angle Change. All points provided in the original toolpath (usually visible in the Move List), and also those obtained after the interpolation, are checked for collisions, making the simulation consistent across all modes (e.g. in Run or Fast Forward modes, or in NC-based, Length-based or Time-based Modes combined with any Simulation Run Speed slider positions).
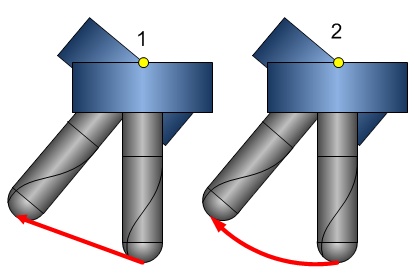
Point 1: RTCP enabled shows how the tool tip moves (red arrow) when RTCP is ON.
Point 2: RTCP disabled shows how the tool tip moves (red arrow) when RTCP is OFF.
Shortest Path status
The Shortest Path status represents the current setting executed by the Machine Simulator regarding the behaviour of a rotational axis when it reaches the limits. The states can be the following:
- Shortest Path: Mathematical - This is the default setting when no command is provided. For example, to go from 0° to 330° around a trigonometric circle, the Machine Simulator will choose the following mathematical path: 0°,…, 10°,…, 20°,…, 300°,…, 330°.
-
Shortest Path: ON - This appears when a command is given to turn the Shortest Path ON. For example, to go from 0° to 330° around a trigonometric circle, the Machine Simulator will choose the shortest path: 0°,.., 350°,…, 340°,…, 330°.
Note: The Machine Simulator considers any axis whose limits describe any multiple of 360°.
Collision checking and material removal are applied when using this setting.
|