|
|
Match Points on Point Cloud/STL  : Options and Results
: Options and Results

Access: Open this function from one of the following locations:
Access: Open this function from the following location:
-
Select Die Design > Springback > Match Points on Point Cloud / STL from the menu bar.
-
Select Springback > Match Points on Point Cloud / STL from the following Die Design Guide: Die Process Design Guide (Forming).
-
Select Solid > Warp > Match Points on Point Cloud / STL from the menu bar.
Create pairs of vectors between source points (a point cloud or regular points) and target points (another point cloud or STL). The resultant pairing between the source and target points is saved in a CSV file. These points can then be used in the Springback table of points.
Required Step 1 
-
Pick the source points (a point cloud or regular points) lying closest to the skin.
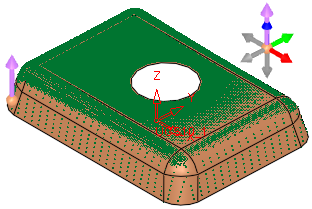
In this example, the source and target point clouds are shown below; the source points are colored yellow, the target points are blue.
The source point cloud is selected.
- Click <exit><exit> to enter the next step.
Required Step 2
- Pick the target points (point cloud or STL).
The system automatically switches to the next step.
Required Step 3 
-
Set the method for pairing the source and target points. The toggle parameter Normal Projection / Direction Projection is displayed:
This is a toggle option Normal Projection / Direction Projection to select the projection direction between the source and target points to create the pairs of matching vectors.
Normal Projection
Projection normal to a selected body.
Pick a reference body to define the NORMAL projection of each source point to a target point. This is the default option.
The system finds the closest source points to the body and then a vector NORMAL to the adjacent face is used to find the matching target points (the closest point on the target point cloud (or STL) with respect to every source point).
Direction Projection
Select projection direction.
Select a direction to define the DIRECTION projection of each source point to a target point; the directional arrow is displayed. The default direction is Z of the active UCS.
The method for pairing the points is the same as for the Normal Projection, except that the direction is not normal but set by the DIRECTION vector.
- Click the Preview button on the Feature Guide to display a preview of the calculated point pairing, based on the selected projection direction. All source points are displayed in purple and target points in blue, with a pairing line between appropriate pairs of points, as shown in the example link below. The examples also show that some target points are not paired as they are either not in the required projection direction or are not the shortest distance between source and target. Similarly, there may be cases where some source points are not paired to targets; for example when two or more source points can be paired to a single target point, the points with the shortest distance between source and target are paired.
-
Left image: The source points are displayed in purple and the target points in blue. A pairing line is shown between appropriate pairs.
Some target points are not paired as they are either not in the required projection direction or not the shortest distance between source and target points.Right image: The image shows a side view of a 3D model. The brown curve represents the reference body, the source points are displayed in purple and the target points (in the point cloud) in blue. The dashed lines are the normals.
Some source points are not paired to targets; source points 5, 6, 7 and 8 may be mapped to the same target point, however only the points with the shortest distance between source and target are paired.
Source point 17 is out of the point cloud and is ignored.
- Click OKOK
 or ApplyApply
or ApplyApply in the Feature Guide to complete the function. The Save As dialog is displayed enabling you to save a CSV file of the point pairs. These points can then be used in the Springback table of points. The default save path for the CSV file is the path of the currently active file.
in the Feature Guide to complete the function. The Save As dialog is displayed enabling you to save a CSV file of the point pairs. These points can then be used in the Springback table of points. The default save path for the CSV file is the path of the currently active file.
This function does not create a feature in the Feature Tree, it only creates a CSV file of the point pairs.
|