|
|
Point Cloud

![]()
Access: Open this function from one of the following locations:
-
Click the
 button from the toolbar.
button from the toolbar. -
Select File > Import > Import to New File or Import to Current File from the menu bar.
From the Import dialog, select Point Cloud from the Files of Type field.
Import files containing Point Cloud data (*.csv, *.pts, *.iso, *.asc, *.pcd) to Cimatron. This enables you to view and work on files containing numerous points, in Cimatron.
Point Cloud is an entity type that allows viewing and working with large quantities of point data. Point Clouds can be imported directly from csv, pts, iso and pcd files, or as an option with Iges files. Point Clouds can be moved, copied, or scaled, and are often used in conjunction with the Springback Deform function. You can select a point cloud by using the Object Filter. You can also reference individual points by changing the filter to Points.
For a summary of the Data Interface Import/Export formats supported by Cimatron (including their CAD version numbers), see Cimatron's Import/Export Capabilities at a Glance.
Cimatron retains the settings of the data interface (Import/Export) dialog from its last use, including the menu state (expanded or collapsed) and the tab that was opened.
What is a Point Cloud?What is a Point Cloud?
A Point Cloud is a set of data points in a coordinate system.
In a three-dimensional coordinate system, the points associated with a particular model, image, or graphic are usually defined by X, Y, and Z coordinates. These coordinates (relating to such an image) are called a Point Cloud and represent the external surface of an object.
Point clouds are generally produced by 3D scanners, which measure a large number of points on the external surfaces of objects around them. As the output of 3D scanning processes, point clouds are used for many purposes, including to create 3D CAD models.
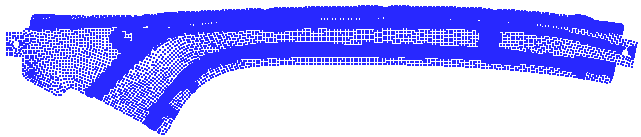
Example of a point cloud:
File formats that support Point Cloud data
Point cloud data may be contained in the following fie formats:
-
CSV File. A CSV file with 3 columns of values:
|
|
Each column represents a coordinate type, as follows: Column A = X Coordinate Column B = Y Coordinate Column C = Z Coordinate |
-
PTS. A PTS file, typically generated by LIDAR scanners, is formatted to store seven data values for each point, including (x,y,z) point coordinates, an intensity value, and RGB colour estimates.
-
ISO file
-
ASC file
-
PCD (Point Cloud Data) file.
Note: It is also possible to import points from an IGES file and get a point cloud by selecting the Points as Point Cloud checkbox.
Working with Point Clouds
The point cloud can be manipulated by numerous functions, such as Move, Rotate, Copy, Boolean operations, and so on. All functions that use a point as input can select a point on the point cloud by using the Close 2 Curve option.
The point cloud is displayed in a single color (which can be changed) and, by default, a resolution of 2x2 pixels (which can also be changed).
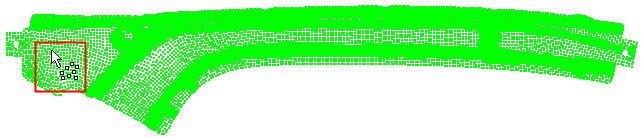
A Point Cloud entity type in the Selection Filter enables the selection of the point cloud as an object; a Point Cloud cursor is displayed when hovering over a point cloud, as shown below.
The point cloud resolution can be changed by picking and right-clicking on the point cloud, and then selecting the required resolution from the Point Size Display options.
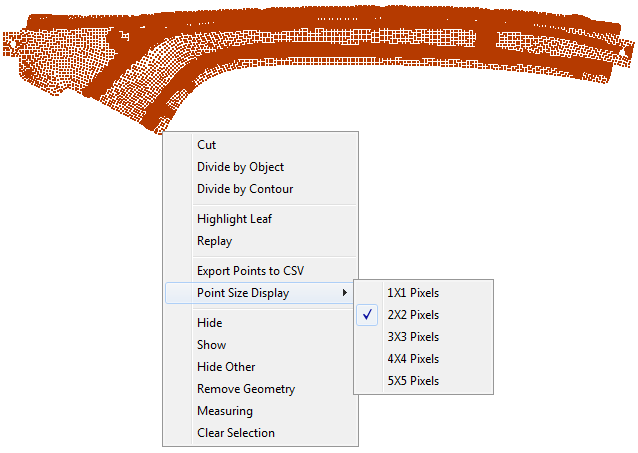
Below are examples of the point cloud with different resolutions:
-
2x2 Pixels (default)
-
1x1 Pixels
|